Fully Articulated Skeletal Robot Hand
thingiverse
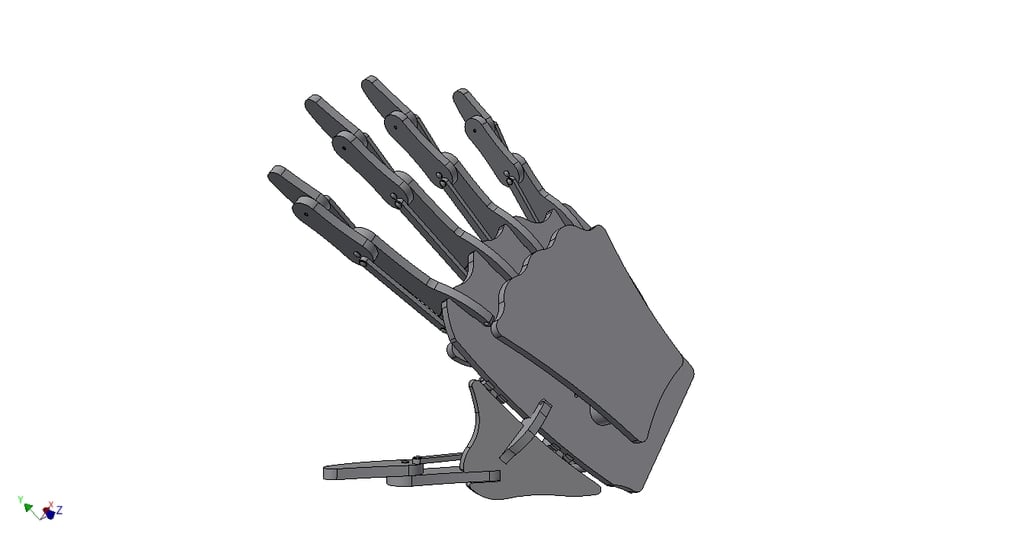
This robotic hand design draws direct inspiration from my own hand geometry, utilizing linkages to enable articulate finger movement in response to metatarsal activation. Visuals demonstrate the range of motion achievable by this mechanical replica. The STEP file contains all necessary individual components for import and assembly, assuming proper execution. Any encountered issues should be brought to attention via comment. Each component has been made readily available for download.
With this file you will be able to print Fully Articulated Skeletal Robot Hand with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Fully Articulated Skeletal Robot Hand.