For use as Robot Shaulder
pinshape
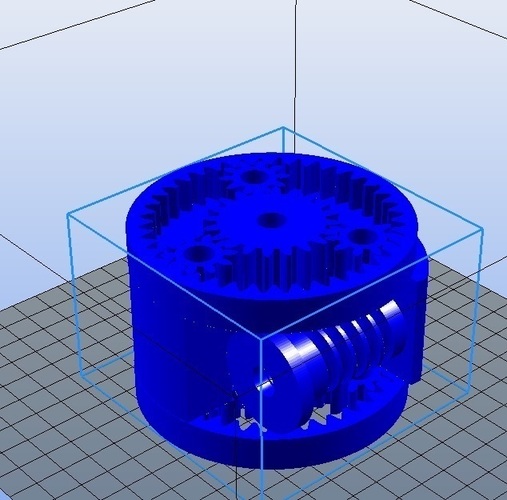
To operate a robot's shoulder system using a 40kg servo motor, you'll need to implement a dual planetary gear set coupled with a worm gearbox. This configuration will amplify the motor's torque while maintaining a precise control over the robot's movements. The setup should include a robust planetary gear system and a compact worm gearbox, ensuring reliable operation and minimizing potential backlash issues. By utilizing this design, you can achieve smooth and controlled rotation of the robot's shoulder joint.
With this file you will be able to print For use as Robot Shaulder with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on For use as Robot Shaulder.