Flexible robot hand
thingiverse
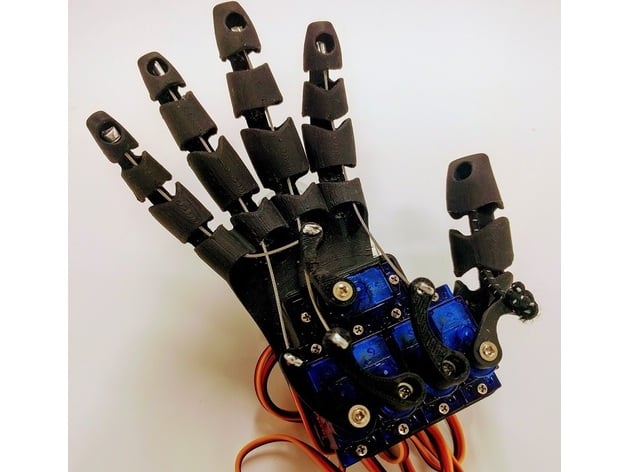
This is a flexible robot hand. Many robot hands require assembly, but this model can be printed at once and using filament that's ABS, not flexible filament. http://blog.smartrobotics.jp/2016/12/21/3d%e3%83%97%e3%83%aa%e3%83%b3%e3%82%bf%e3%81%a7%e4%b8%80%e4%bd%93%e9%80%a0%e5%bd%a2%e5%8f%ab%e3%81%aa%e3%83%95%e3%83%ac%e3%82%ad%e3%82%b7%e3%83%96%e3%83%ab%e3%83%8f%e3%83%b3%e3%83%89/ Servo: SG92R http://www.towerpro.com.tw/product/sg92r-7/ The servo fixing method is M2-8mm. The thumb string is https://www.amazon.com/dp/B007DLVLDY/ref=cm_sw_r_tw_dp_x_Mmmwyb8TQ6S1N, and the other finger strings are wires. Print Settings: Printer Brand: Zortrax Printer: Zortrax M200 Rafts: Yes Supports: Yes Resolution: 0.19 or 0.9 Infill: Maximum Notes: Filament is Z-ABS. Speed is normal. Supports angle is 10 or 20 degrees, and fan speed is 20%. Post-Printing: How I Designed This. This robot hand was designed with flexibility in mind. It's a single-part design that can be printed at once using ABS filament. The servo motor used is the SG92R, which is connected to the fingers using M2-8mm screws. The thumb string is a specialized cable available on Amazon, while the other finger strings are simple wires. The print settings for this model include a Zortrax printer and the Zortrax M200 specific settings. Rafts and supports are enabled to ensure proper adhesion and stability of the printed parts. The resolution can be set to 0.19 or 0.9 mm, depending on the desired level of detail. Infill is set to maximum for added strength and durability. When printing this model, use Z-ABS filament and set the speed to normal. The supports angle should be set to either 10 or 20 degrees, and the fan speed to 20%. After printing, you can remove any excess material from the print bed and your robot hand is ready to go!
With this file you will be able to print Flexible robot hand with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Flexible robot hand.