Filament Runout Sensor
thingiverse
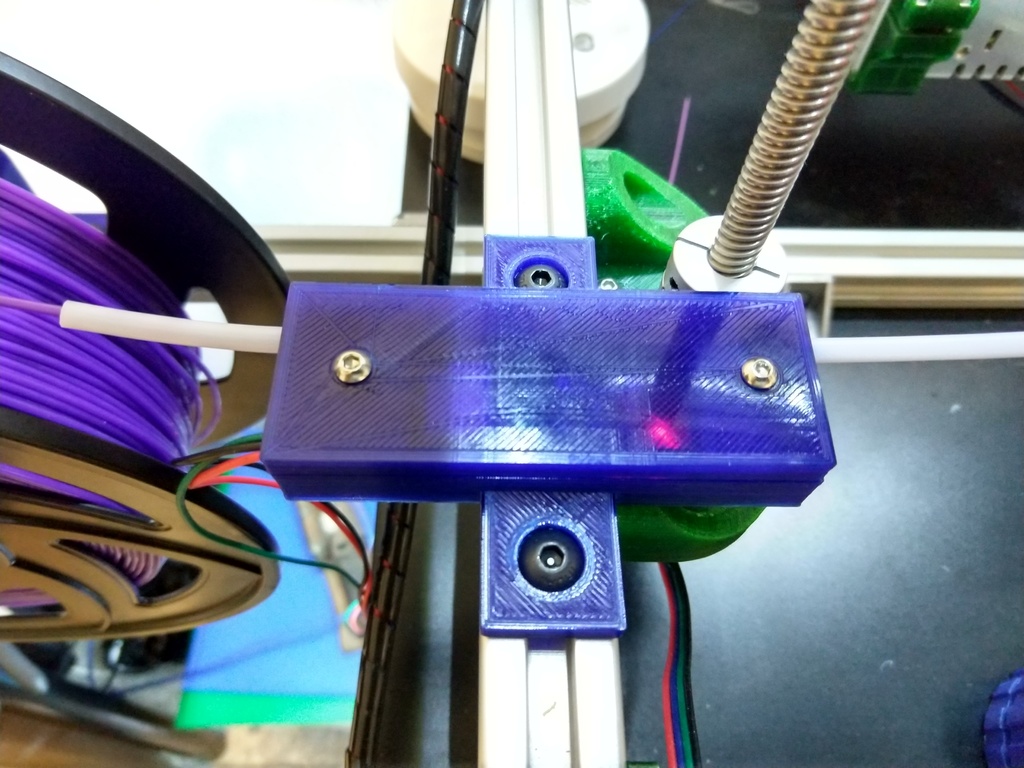
I was browsing Thingiverse for a filament runout sensor that utilizes basic X,Y,Z end stop boards found on most RAMPS kits, but couldn't find one that met my expectations. This design mounts to 2020,2040,etc. extrusion and uses M3 nuts and bolts for assembly, connecting to the extrusion with M5 bolts and T-Nuts. It can be used in both bowden and direct drive applications, pausing your machine automatically when filament runs out, saving you from failed prints due to low filament levels. Two versions of the file are available: one with mounting tabs and another without. To enable the Filament Runout Sensor in Marlin, define and uncomment this line by changing #define FIL_RUNOUT_INVERTING to true in Configuration.h: #define FILAMENT_RUNOUT_SENSOR #if ENABLED(FILAMENT_RUNOUT_SENSOR) #define NUM_RUNOUT_SENSORS 1 // Number of sensors, up to one per extruder. Define a FIL_RUNOUT#_PIN for each. #define FIL_RUNOUT_INVERTING true // Set to true to invert the logic of the sensor. #define FIL_RUNOUT_PULLUP // Use internal pullup for filament runout pins. #define FILAMENT_RUNOUT_SCRIPT "M600" #endif You must also define and uncomment this line in Configuration_adv.h: #define ADVANCED_PAUSE_FEATURE The lead on the end stop is mislabeled to use on your servo header. You will need to swap the red and black pins, so that the plug goes Green, Red, Black order. Plug the sensor into SERVO3. On a RAMPS board, this is the 4th set of pins on the servo header, starting from the left as SERVO0.
With this file you will be able to print Filament Runout Sensor with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Filament Runout Sensor.