Falcon Hand V1
thingiverse
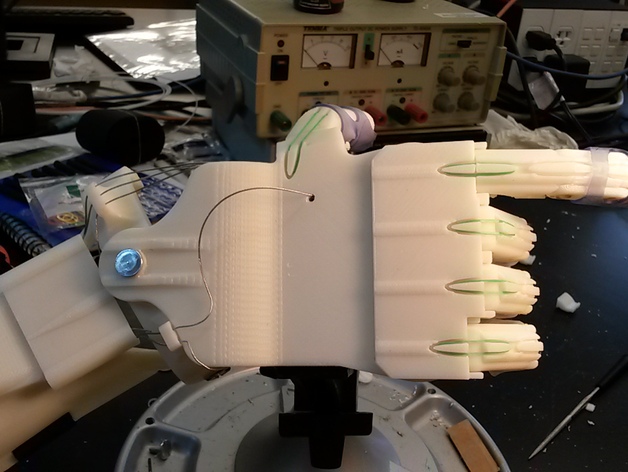
Our first offering to the E-Nable community is the "Falcon Hand V1," a cutting-edge prosthetic device that empowers users by incorporating versatile grasps based on their unique radial-ulnar deviation needs. We streamlined the printable-prosthetic manufacturing process, eliminating unnecessary complexities and simplifying the control mechanism. Control cables are securely crimped onto the fingertips rather than tied in place, while tension is achieved through a patented quarter-turn pinching design. To reduce the need for intricate elastic cable routing, we rely on orthodontic rubber bands as our spring return mechanism. Furthermore, we minimized hardware use by employing filament hinges and snap-on proximal knuckles. This innovative hand showcases some of the pioneering design ideas we set out to test and improve. However, it is crucial to emphasize that this model should not be used on actual patients; it remains a developmental prototype with active updates being worked into Version 2. Our collaborative effort at Seattle Pacific University under the leadership of Dr. Adam Arabian, Sean Russell, and Barrett Estep led to this outstanding outcome. Seattle Pacific University plays a pivotal role in E-Nable innovations. Get detailed assembly instructions on Instructables:http://www.instructables.com/id/Falcon-Hand-V1/\nTo begin, you will need:\n• 1 Thumb\n• 1 Tensioner Snap Cover\n• 4 Proximal Phalange\n• 1 Proximal Knuckle Slide Cover\n• 1 Palm\n• 4 Middle Phalange\n• 1 Gauntlet\n• 4 Distal Phalange\n• 5 Control Cable Crimper (we recommend printing extra for reliability)\n• 4 Block (optional component that wasn't needed in our test version)\n• 1 Arch
With this file you will be able to print Falcon Hand V1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Falcon Hand V1.