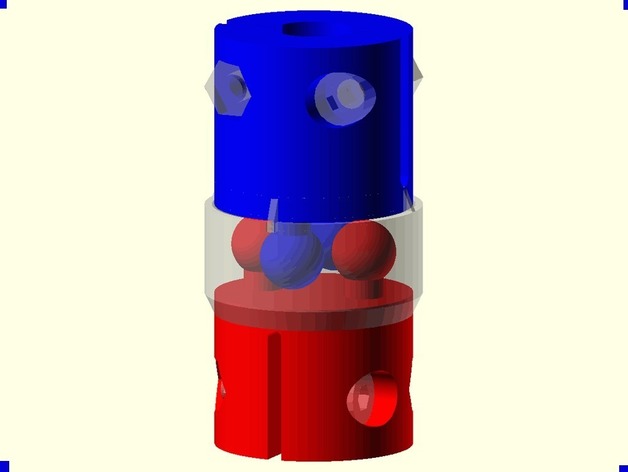
Elastomeric Coupling 0v0: 5mm stepper motor to 8mm threaded shaft
thingiverse
The original thing has been updated with a newer version available at http://www.thingiverse.com/thing:7831. This next-generation printable elastomeric coupling is designed to fit a molded and cured-in-place rubber insert, which uses cured-in-place RTV silicone sealer as the rubber part. The updated version boasts improved clamping and balance upon even tightening. However, after building and testing it, I found that the silicone takes too long to cure and is too soft, causing overloads to make it off-center. Therefore, I do not recommend creating this thing. To print the parts, use a solid profile for strength. Drill 3mm holes through the clamping areas. The clamps will have good force but limited travel. Ensure that the parts fit snugly on the shafts; if loose, resize the shaft hole and reprint. Fill the cup with RTV silicone sealer and place the top piece, jiggling it to distribute the silicone. Allow 24 hours for curing in a warm spot. Post-curing, remove excess silicone and cut off the alignment triangles on the top piece. To increase flexibility, remove the bottom piece's cylinder that held the silicone during curing. Feel free to experiment with other materials like Sho Goo (http://bit.ly/hc11mc). If you create this version, kindly share your experience and modifications made for better performance.
With this file you will be able to print Elastomeric Coupling 0v0: 5mm stepper motor to 8mm threaded shaft with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Elastomeric Coupling 0v0: 5mm stepper motor to 8mm threaded shaft.