EduMIP Outrigger
thingiverse
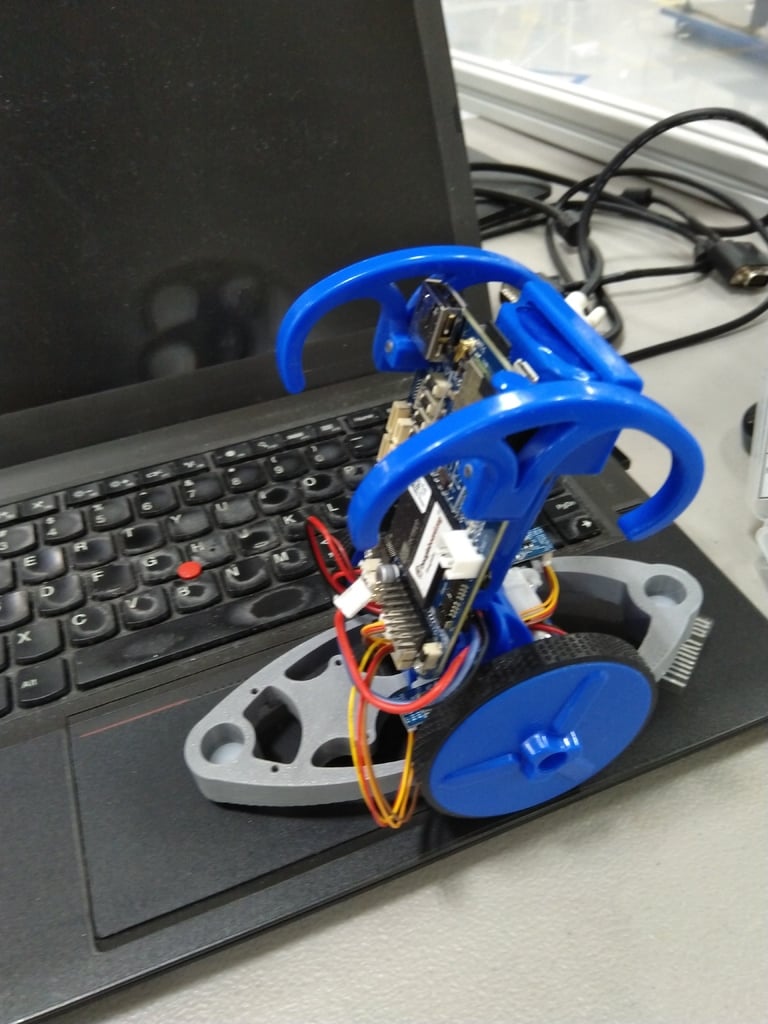
Update: Added a picture of the actual part. This outrigger is specifically designed for the EduMIP (Mobile Inverted Pendulum) robot, which may no longer be available - check out the web site at https://www.renaissancerobotics.com/eduMIP.html for more information. Other resources are also accessible, and the robot is reportedly open source. Building a ROS-based system with this kit is one of the most cost-effective ways to get started, based on the Beaglebone Blue. The 'bot must balance in order to move, which requires a significant amount of both power and CPU cycles. Since the Beaglebone Blue isn't the most powerful board and battery size is limited, I wanted a way to use the system without being penalized by balancing issues. Additionally, I needed a location to mount an upward-facing web cam, making this outrigger a perfect solution. I've printed two previous designs that led me to the current one, which you can see in pictures once complete. This outrigger is designed to accommodate some small nylon rollers available on Amazon - check out https://smile.amazon.com/gp/product/B07VGGVXMH/ref=ppx_yo_dt_b_asin_title_o04_s00?ie=UTF8&psc=1 for more details.
With this file you will be able to print EduMIP Outrigger with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on EduMIP Outrigger.