Drill Motor Speed Controller Bracket
thingiverse
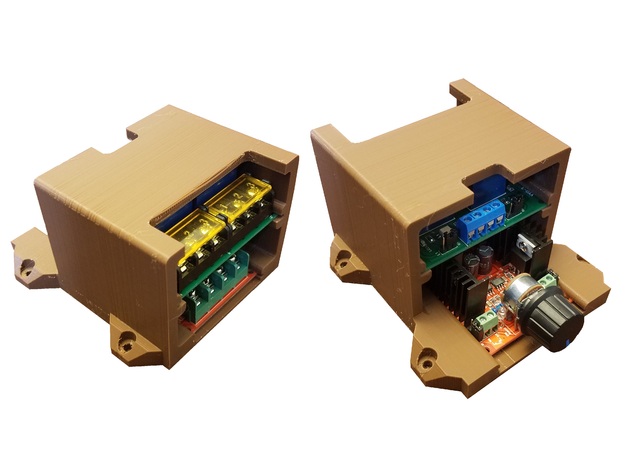
Harbor Freight drill motors are a popular choice for combat robot projects due to their affordable price tag, with a motor and 18V Ni-Cd battery combo costing only $20. The challenge lies in finding a suitable motor controller that won't break the bank, as most options exceed $100 per motor. After scouring online marketplaces, I managed to assemble a 30A setup for around $15 per motor, along with an Arduino board that can support up to four motors for an additional $10. The motor controller features a 0-5V analog input, which is then connected to a dual relay board to control the direction of the motor's rotation. A wiring diagram and links to the boards used are provided below. Demo video: https://youtu.be/5luJtLUHcbo Cordless drill - http://tinyurl.com/hc5fwsq This cordless drill is identical to the one sold by Harbor Freight for $20. Motor Controller - http://tinyurl.com/MotorController40 Note that this controller lacks master and slave mode, so the potentiometer will need to be removed and the yellow wire connected directly to the Arduino. Dual Relay Board - http://tinyurl.com/5vRelayBoard These boards can be found on eBay for around $4 each. Although the setup consists of a 30A motor controller and a 40A controller, short test runs have not generated excessive heat; further testing will be conducted to confirm this. As for code, I don't currently have any available, but a helpful "how-to" post can be found at http://rcarduino.blogspot.com/2012/04/how-to-read-multiple-rc-channels-draft.html. Print Settings: Printer Brand: Wanhao Printer: Wanhao Duplicator i3 V2 Rafts: No Supports: Yes Resolution: 0.2 Infill: 25%
With this file you will be able to print Drill Motor Speed Controller Bracket with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Drill Motor Speed Controller Bracket.