Dexty - bionic robot hand
thingiverse
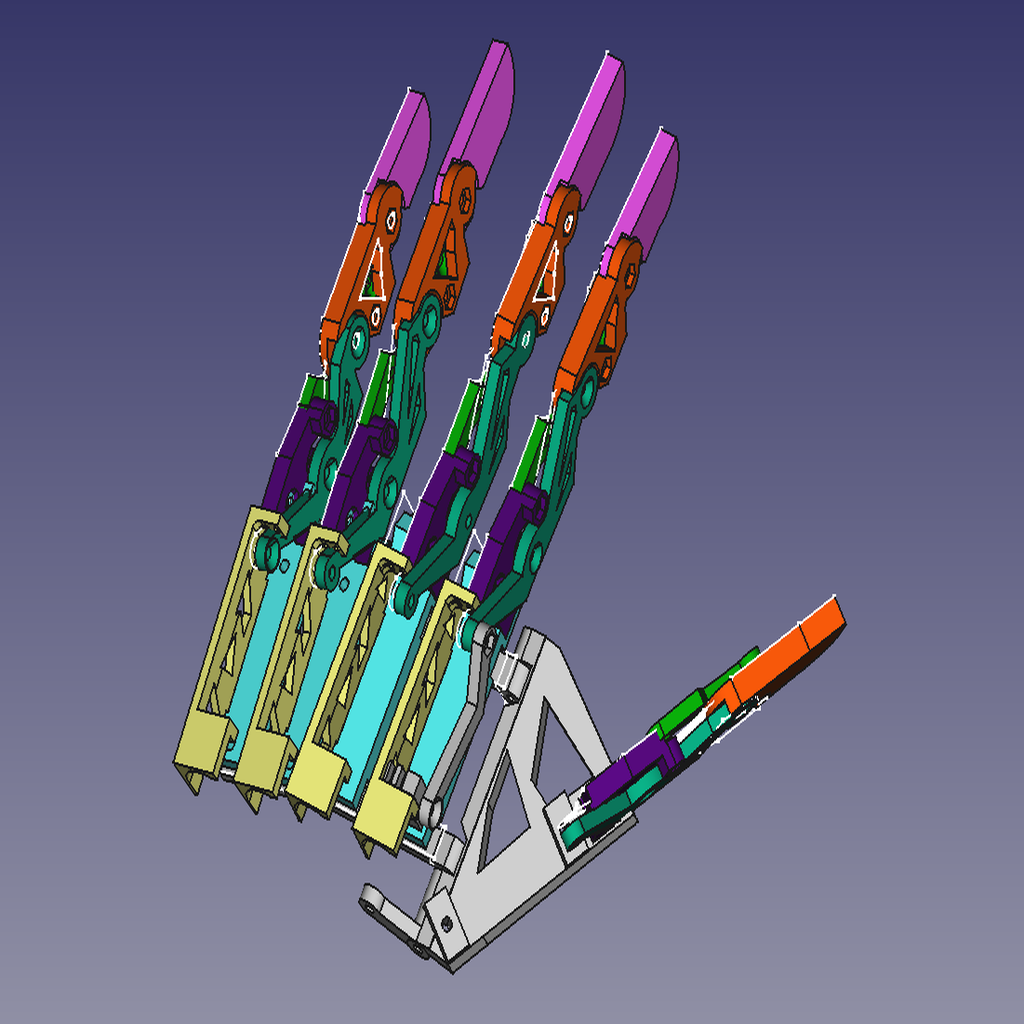
 This design emulates a bionic robotic hand. The goal is to control each finger using a single motor. The motors used are sourced from DVD drives, making them extremely affordable or even free. To assemble the linear carriage for the motor, you will need a 2mm brass tube or a similar material. For all assembly, you will require a collection of m3x15, m3x10, and m3x5 bolts and nuts. P.S. This design is still in its raw form and has not been optimized for 3D printing at this time. An accurate BOM will be available in future updates. ##### **TODO:** - Optimize all parts for 3D printing - Finalize the design - Create a comprehensive BOM list - Provide a detailed specification of stepper motors - Describe electronic modules - Develop and share firmware for Arduino
With this file you will be able to print Dexty - bionic robot hand with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Dexty - bionic robot hand.