Controlling 1/4" Ball Valve with SG90 Servo (Stackable)
thingiverse
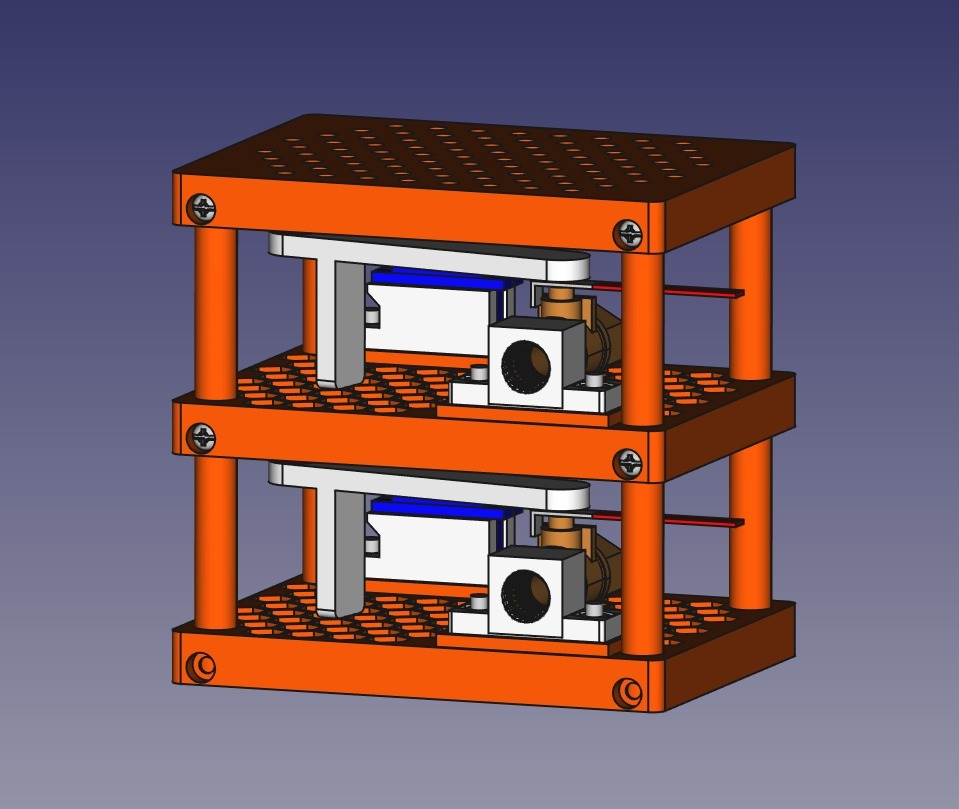
Actuating a quadrupedal robot's knee joint via pneumatic cylinder is a key component of this project. More details will follow, but don't get your hopes up just yet. Controlling the exhausts of the solenoid with ball valves is crucial for adjusting the knee's position. The setup allows the ball valve to be actuated from closed to partially open and enables stacking. The honeycomb structure of the base and top serve as mounting holes sized for 8-32 Nylon Locknuts. Assembly instructions can be found in the Post-Printing section. Here are the non-3D printed parts required in the configuration: * 2 Masterforce 1/4" NPT Brass Air Flow Valves * 2 SG90 Servos * 4 x 5x11x4mm Ball Bearings * 8 x 6-32 Nuts * 8 x 6-32 1/2" Machine Screws * 8 x 8-32 Nylon Locknuts * 8 x 8-32 3/4" Machine Screws
With this file you will be able to print Controlling 1/4" Ball Valve with SG90 Servo (Stackable) with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Controlling 1/4" Ball Valve with SG90 Servo (Stackable).