Coaxial Swerve Module
pinshape
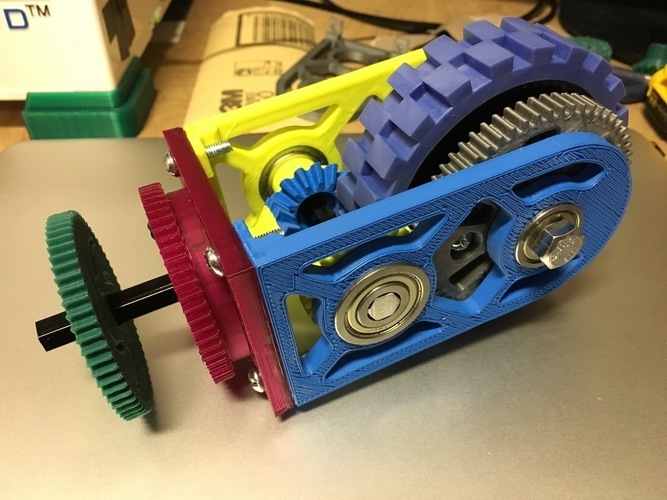
A compact swerve module designed for 3D printing. The drive axle is secured with a sturdy 3/8-inch bolt. All hex shafts feature a standard 3/8-inch hex. This innovative design allows users to teach swerve concepts at a fraction of the cost compared to an FRC-sized robot and control system. It utilizes four-inch wheels for optimal performance. Bill of Materials (Per Module): * Two side panels * One top plate * One top spacer * One Vex to hex gear * One 60-tooth Vex gear * Two bevel gears * One 30-tooth gear * One 54-tooth wheel gear * One drive shaft spacer * One drive axle (0.375-inch hex, minimum length: 2.5 inches) * One bevel axle (0.375-inch hex, length: 3.125 inches) * Four FR6ZZL-hex bearings * Four 3/8-inch id flanged, shielded ball bearings (FR6ZZ) * One 3/8-inch bolt * One 3/8-inch lock nut * Sixteen #10-24 screws (at least ten, up to sixteen for maximum mounting points) * Four #10-24 nuts * One four-inch wheel (I used the HiGrip Wheel from AndyMark) The base plate offers a visually appealing design but lacks sufficient structural stability to support swerve modules as a sole mounting point. However, it maintains correct spacing for all motors and gears, making it a useful template for working with other materials. Rafts and supports are not required for printing. I used a 0.2mm layer height. Infill rates above 20% generally provide sufficient structural integrity.
With this file you will be able to print Coaxial Swerve Module with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Coaxial Swerve Module.