Catia V5 - DMU - Kinematics - Revolute Prismatic Joint
grabcad
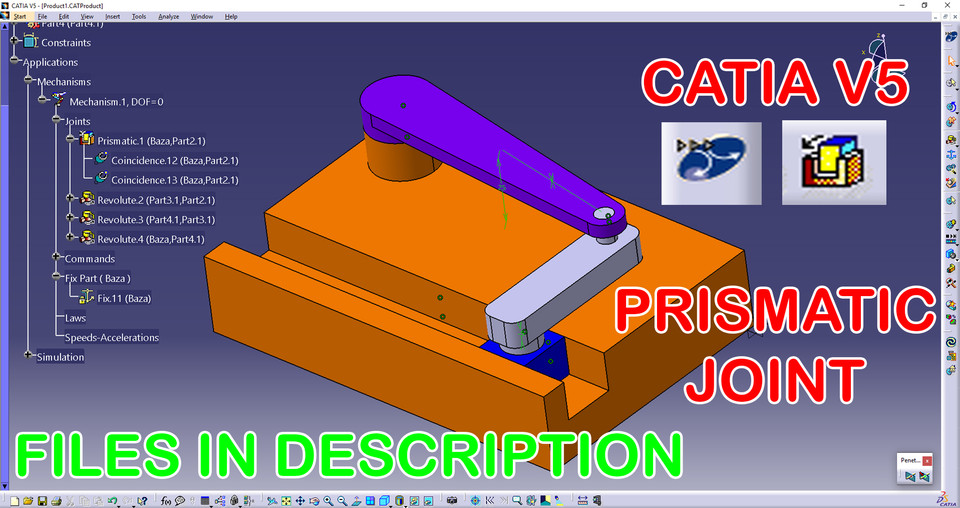
To define a Prismatic Joint in the DMU Kinematics Workbench of CATIA V5, follow these steps: 1. Launch the CATIA V5 software and access the DMU Kinematics Workbench. 2. Create or open an existing assembly that contains the parts to be connected by the prismatic joint. 3. Select the "Insert" menu option from the top navigation bar in the workbench. 4. Choose the "Joint" option from the dropdown list of insert options, then select "Prismatic Joint" from the sub-menu. 5. A new Prismatic Joint component will be inserted into the assembly, represented by a pair of parallelograms with a rectangular hole in between. 6. To modify the joint's properties, right-click on it and choose the "Properties" option from the context menu. 7. In the Properties dialog box, you can adjust settings such as the joint's orientation, position, and size to match your specific requirements. 8. Once you have defined the prismatic joint, you can use it to connect two or more parts in the assembly by dragging and dropping them into place between the parallelograms. 9. The software will automatically update the kinematic relationships between the connected parts based on the prismatic joint's configuration. 10. You can further refine the joint's behavior by using advanced options such as friction, clearance, and damping to simulate real-world conditions. By following these steps, you can create a prismatic joint in the DMU Kinematics Workbench of CATIA V5 that accurately represents the motion and constraints of your mechanical system.
With this file you will be able to print Catia V5 - DMU - Kinematics - Revolute Prismatic Joint with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Catia V5 - DMU - Kinematics - Revolute Prismatic Joint.