Biped Robot Walker V1
thingiverse
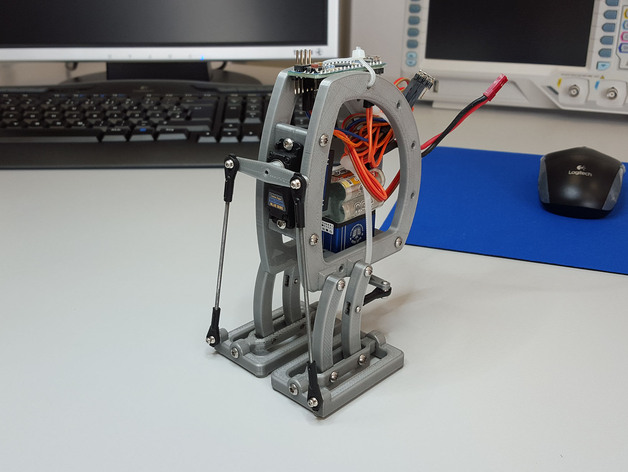
A basic Biped robot walker powered by two servos, controlled by a compact Arduino Micro. Based on Ken Gracey's project at http://davidbuckley.net/DB/inspired/KenGracey/KenGracey.htm Print both sides, two feet, four servo carriers, two ankles, and the rear legs, front legs. Holes are designed to accept M3/4-40 threading directly. Use M2 for rear leg links and attaching the servo rod to the feet. Check out photo details on linkages and rods at http://www.thingiverse.com/thing:28566. Servo arms (length 45mm) are also printed here. Eye bolts for leg linkage come from Conrad #234955. The robot utilizes two mini or micro servos and an Arduino Micro with the servo library installed. The walking code is available at https://github.com/ServoKit. Watch a video of it in action: https://www.youtube.com/watch?v=KWFyN5lX31U A typical print in normal quality takes about 4 hours on an Ultimaker 2. You can also order the printed parts from Shapeways at http://www.shapeways.com/product/DM7DWX3EX
With this file you will be able to print Biped Robot Walker V1 with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Biped Robot Walker V1.