BAXTER Robot Elastic Pen Holder
prusaprinters
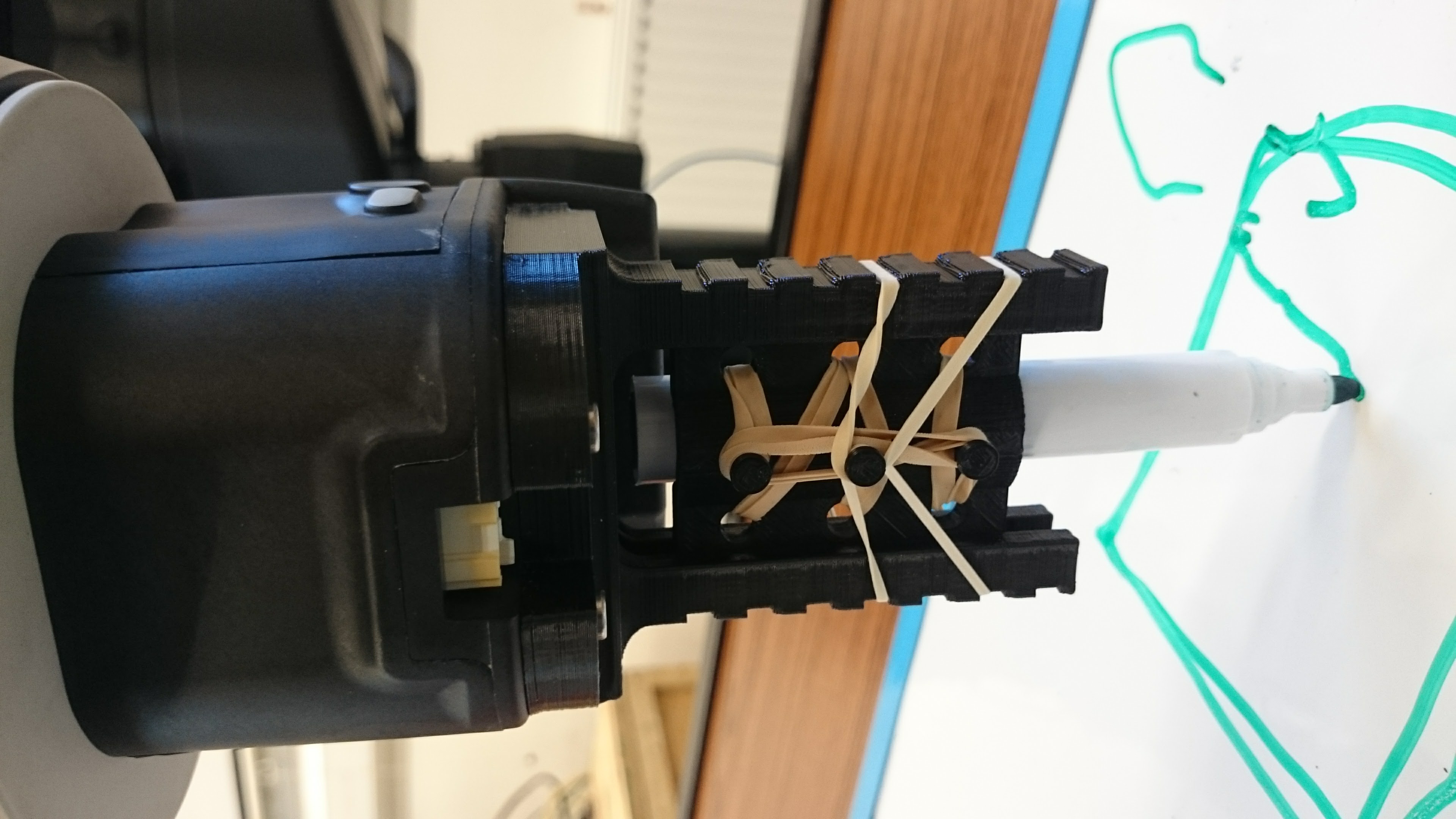
<p>Currently (April 2017), I'm a PhD candidate at the <a href="https://www.plymouth.ac.uk/research/robotics-neural-systems">Centre for Robotics and Neural Systems, Plymouth University</a>, working with <a href="https://github.com/ricardodeazambuja/IJCNN2016">learning (or programming) by demonstration using Spiking Neural Networks (SNN) implemented as Liquid State Machines (LSM)</a>.</p> <p>So, I designed this elastic pen holder because it's not so easy to teach a robot to draw using an uneven surface (although we have <a href="https://github.com/ricardodeazambuja/I2MTC2017-LSMFusion">a paper based on LSM and Sensor Fusion</a> that partially solves this problem). Also, Baxter was not designed to be super precise and <a href="http://sdk.rethinkrobotics.com/wiki/Hardware_Specifications#Miscellaneous_Specifications">its positional accuracy is +/-5mm</a>.</p> <p><em>Hint: you should be able to reuse the same screws from the vacuum or electrical grippers.</em></p> <p>If you liked this <em>thing</em>, don't forget to visit my personal website: <a href="http://ricardodeazambuja.com">ricardodeazambuja.com</a></p> <p><strong>DISCLAIMER 1: use it at your own risk ;)</strong><br/> <strong>DISCLAIMER 2: Baxter is a <a href="https://en.wikipedia.org/wiki/Cobot">cobot</a>, but it is only safe to interact with people (when using <a href="http://sdk.rethinkrobotics.com/wiki/Arm_Control_Modes">Joint Position or Velocity control modes</a>) if a risk assessment is done every time you add a new end effector. So, be careful if you decide to use this pen holder (don't forget about Disclaimer 1).</strong></p> <h3>Print instructions</h3><h3>Category: Robotics Print Settings</h3> <p><strong>Printer Brand:</strong> LulzBot</p> <p><strong>Printer:</strong> <a href="http://amzn.to/2EUWH5X">TAZ 6</a></p> <p><strong>Rafts:</strong> No</p> <p><strong>Supports:</strong> No</p> <p><strong>Resolution:</strong> 0.2mm</p> <p><strong>Infill:</strong> 40%</p> <p><strong>Notes:</strong></p> <p>You need to activate the full settings (Cura menu Expert, Switch to full settings) to change the infill. And don't forget to click "Yes" when Cura asks if you want to copy the settings from quickprint ;)</p> <h3> How I Designed This</h3> <p><strong>Final assembly in Fusion 360</strong></p>
With this file you will be able to print BAXTER Robot Elastic Pen Holder with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on BAXTER Robot Elastic Pen Holder.