BaRo - Balancing Robot for FPV
thingiverse
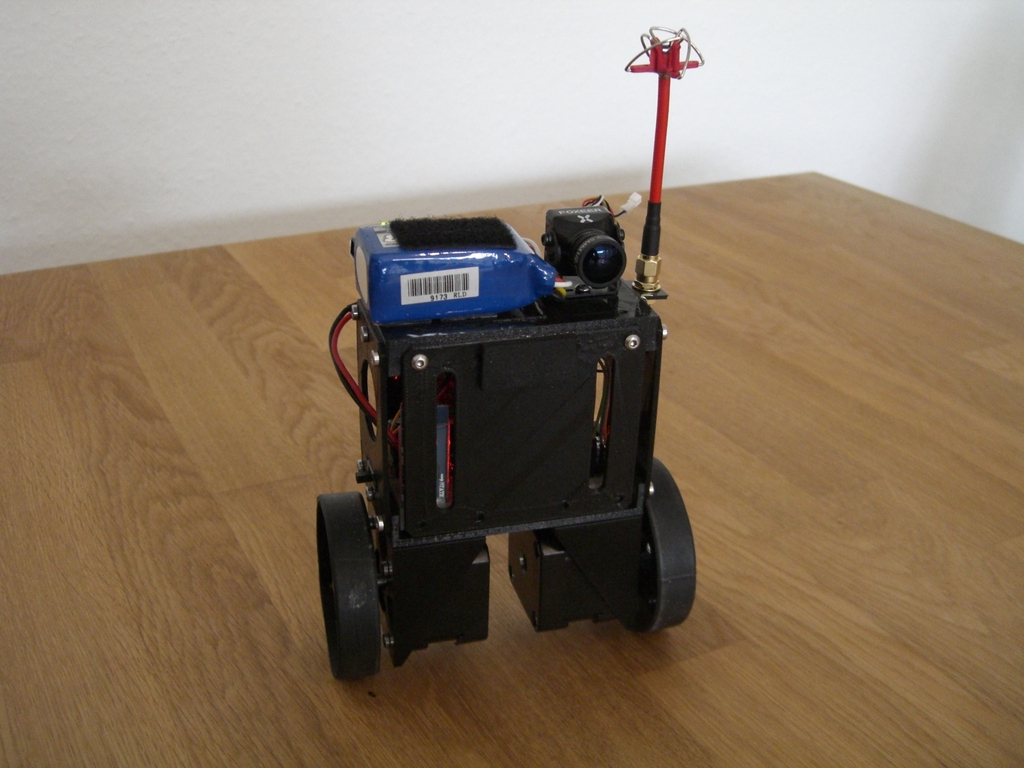
The project involves designing a compact, user-friendly, and easy-to-assemble self-balancing robot system for indoor FPV applications. The robot's primary function is to serve as a testing and development platform, with its components carefully chosen for accessibility and simplicity. Key features of the robot include: - 2x Nema17 motors with 200 steps per revolution for smooth movement - 2x A4988 stepper motor drivers for efficient power management - 1x Arduino Nano clone for processing and control - 1x MPU6050 sensor for navigation and balance adjustments - 1x HC-06 Bluetooth module for wireless connectivity - 1x 470uF 16V capacitor for power regulation - A compact breadboard to hold the Arduino, MPU, and Bluetooth module - A mini breadboard to accommodate the stepper driver modules - 1x 3S 850mah LiPo battery for reliable power supply - An optional 1.3" I2C Oled display for enhanced user interface (FrontOled13.stl file required) Additional components include wires, connectors, M3 screws, a switch, double-sided tape, a battery strap, hot glue, bike tubes for wheel friction enhancement, and FPV equipment for added functionality. Development of the robot's source code is ongoing. A self-written program is currently in use, but it will be made available upon completion and uploaded to a public repository. The project has shown promising results, with the robot performing well and demonstrating reasonable robustness.
With this file you will be able to print BaRo - Balancing Robot for FPV with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on BaRo - Balancing Robot for FPV.