Autonomous-Webserved-Tanktrack-Robot
thingiverse
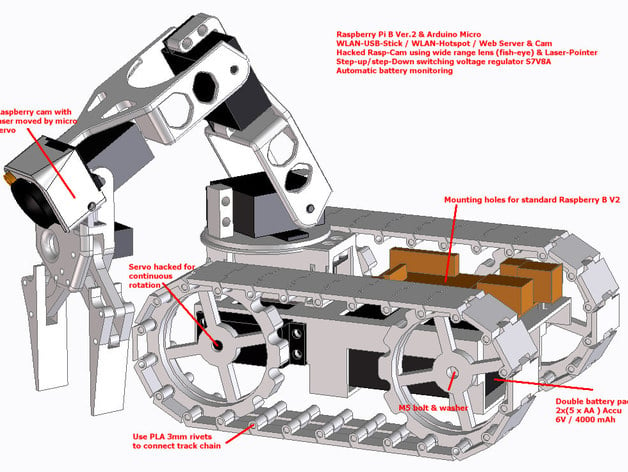
I'm merging several skills into one task by creating a tank track robot controlled by a Raspberry Pi that uses a webservice. The RSPI also acts as a wireless hotspot, so you can control the robot from your smartphone using a dynamic website with webcam views. The Arduino Micro communicates to the RSPI over I2C and controls 8 servos, and a battery state monitor is implemented too. I've chosen standard AA cells for power, arranged in two rows of five 1.2-volt batteries. A step-up/step-down switching voltage regulator guarantees a steady 5-volt supply even on low batteries. You can see my latest video here: https://www.youtube.com/watch?v=D2brukbh378 Updates: On March 12, 2018, I answered frequently asked questions about the servo: it's a MODELCRAFT BMS-410C model, which you can buy in Europe from Conrad. This servo has an axle receptacle in its rear housing, making it very interesting. As of April 1, 2016, after a long break, I returned to this project and upgraded my Raspberry Pi to the 3B model with integrated Bluetooth and WiFi. With improved performance, I no longer need a separate WiFi stick. Now, I'm looking into using addressable digital servos or creating my own Digital2PWM-Adapter for serial (BUS) connections to reduce cable clutter. As of July 7, 2015, this project is ongoing, and the main issue now is battery power duration: one camera, eight servos, two controllers, web service, and Wi-Fi hotspot consume a total of 2.5 amperes. Maybe I was overambitious in trying to do too much at once! My goal is still to build a remote-controlled robot with a camera. Looking for alternative video transmission systems that don't require web services. As of February 26, 2015, I added tank tracks to the chassis for printing on a 1.75mm filament rod. On February 5, 2015, software was implemented using RSP as a WLAN hotspot with Webserver – communicating with Arduino over serial, which talks to PCA9685 via I2C. As of January 21, 2015, an electrical circuit fault was fixed, and the MOSFET got the correct voltage. Now it has reduced resistance. On January 20, 2015, a new Battery-Pack was built with more available current using sixteen AA batteries arranged as four 4-cell packs. January 19, 2015, I implemented PCA9685. It works perfectly! The first trial without RSP verified trigonometric calculations on Arduino. On January 8, 2015, the project was completed. A second Arduino Micro simulated RSPI-I2C communication, using a joystick and an experimental arrangement (see images). Huge servo twitching due to Arduino overloading led me to order special servo drivers from Adafruit's PCA9685. As of January 6, 2015, I added a layout extension board preview. Still need to verify its functionality before releasing the eagle file. On December 28, 2014, a laser pointer was moved to the middle of the gripper, allowing precise pointing at desired objects. The camera was changed from RSPI-Wide-Angle Cam (it's much lighter). I also added 2 cable guides for arm wiring because it kept bending and buckling. As of December 21, 2014, the chassis width increased, eliminating the need to desolder video connectors.
With this file you will be able to print Autonomous-Webserved-Tanktrack-Robot with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Autonomous-Webserved-Tanktrack-Robot.