Automatic 2 speed gearbox for RC Unimog (attempt #3)
prusaprinters
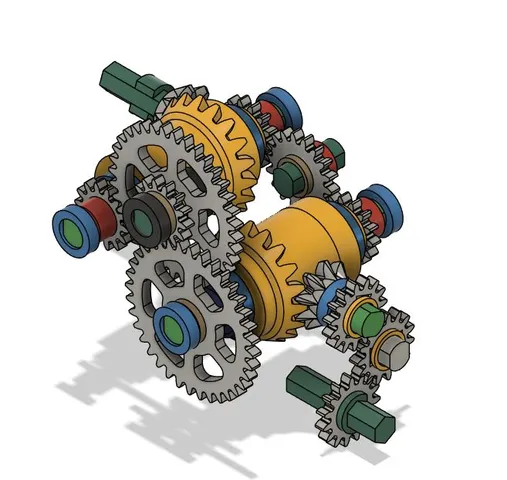
This is my third attempt at a 2 speed automatic gearbox and it's been delaying my Unimog RC project for quite some time… You won't see attempt #2 because it didn't work… The clutch would break (too) soon, so I gave up and tried something else.This design is completely different ; I had originally dismissed it because I needed to cram 2 differentials in the available space on my Unimog RC design. And remember in attempt #1 (here) I was using one of my big differentials.So I came back to my differential #3 (the small one) and changed a few things:The crown gear can now be in 2 different places so that the pinion does not need to be in the center…I added MR63 ball bearings to the spider gears because this time we are using them all the time (and not only in curves like in the normal use of a differential)So how does it work and what are the gear ratios ?Differentials allow wheels to turn at different speeds when the car turns. The outer wheel will go faster than the inner wheel (less travel). But if you look from the point of vue of the diff cup you could say the differential is averaging the speeds of the right and left wheels.So that's what I used in this design.Let's say the 1st stage gearbox (here) delivers 1000 rpm. Then the diff cup of the 1st differential will go at 500 rpm (1:2 gear ratio from pinion to crown gear) and the 2 drive axles will also go at 500 rpm as ( 500+500) /2 = 500.Now on the right side we have 3 gears that connect to the right axle of the second differential and the ratio is 1:1 . On the left side we have a 1:6.5 ratio as we go from 14 to 36 and then again from 14 to 36 teeth (14/36 times 14/36 = 0.15) so the reduction on the left side is quite big.Now what happens with the speeds? So the right axle of the 2nd diff will go at 500 rpm (1:1) but the left axle of this differential will go at 500 x 0.15 = 76 rpm. So the diff cup of the 2nd diff will go at (500 + 76) /2 = 288 rpm and the output pinion will go at 576 rpm. The 3 output gears do not change the rpm (their ratio is 1:1). So in this configuration we have a reduction of 1000/576 = 1.72 to 1. THIS IS THE LOW GEAR.How do we get high gear? Well instead of ball bearings, the middle axle of the left side has 2 fake BBs made of TPU. These are pretty tight so that under a normal load they completely block the left side of the 2 differentials. So now the ratio of the gearbox is … 1:1.(The right drive axle of the first diff is blocked so to get 500 rpm at the diff cup the left axle is going at 1000 rpm as 0 + 1000 /2 = 500; as the left ratio is 1:1 the left axle of the 2nd diff is also going at 1000 rpm and remember the right axle is blocked so the diff cup also goes at 500 rpm as 0+1000 /2 =500, thus the output is 1000 rpm = input; so the overall ratio of the is 1:1) THIS IS HIGH GEAR.How do we switch gears ? Under load, and due to the high ratio on the left side, the left gears start to rotate. When this happens we have the low gear. As the ratio is high we do not loose too much power (but we do loose some) when switching. As a result the torque from the motor gets higher which is the goal of gear switching !The TPU fake BBs need to be tuned. The idea is that the truck stays in high gear with its full weight including body, battery and accessories and overall friction losses in all the gears.In case of insufficient friction in the TPU brakes it could happen that the truck always stays in low gear. But that would not be a total failure like when some part breaks. Because as you see even if it does not work (the auto GBX) it still works (the truck) !Mounting tips:For the differentials, look at my differential #3; the spider gears now include an axle onto which you need to put a MR63 BB (3x6x2.5) and then slide it into the diff cup.There is a number of spacers (SP1, SP2, SP3, SP4 and SP5). Due to print and mounting tolerances (you need some play) you might need to adjust the spacers. I suggest you print more SP1 and stack them when needed. SP3 and SP5 work also as blockers for the 2 big 6700ZZ BBs. Look at the F360 pictures for the right sequence (BB, spacer, gear,spacer BB …)Gold = SP1, Brown = SP2, Blue = SP3, Red =SP4, Gold (Big) = SP5Anyway the axles need to rotate freely , you might need to sand them a bit to ease mounting.The housing is divided in 6 parts and you can see the gears. So it is very easy to see when you are switching to low gear (the big 36 T gear starts to rotate). H1, H2 and H3 are held together with 2 M3 screws. After adding H4 and H5 2 additional M3 screws will hold every thing together. The clamp (2 M3 screws 35 and 40 mm) will be curved because the TPU brakes are bigger than the BB placeholders.For the input differential use the b parts (diff cup and pinion) for the output differential use the normal parts (same as diff #3).As I was running out of MR117 BBs I did some fake ones in PLA. I've added a print file for those. The TPU brakes are bigger (external diameter) and tighter (internal diameter). To print TPU without damaging your build plate put some kid's paper glue (the tube stick like a lipstick).
With this file you will be able to print Automatic 2 speed gearbox for RC Unimog (attempt #3) with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Automatic 2 speed gearbox for RC Unimog (attempt #3).