Arduino quadruped robot for MG995 (OPEN SOURCE)
thingiverse
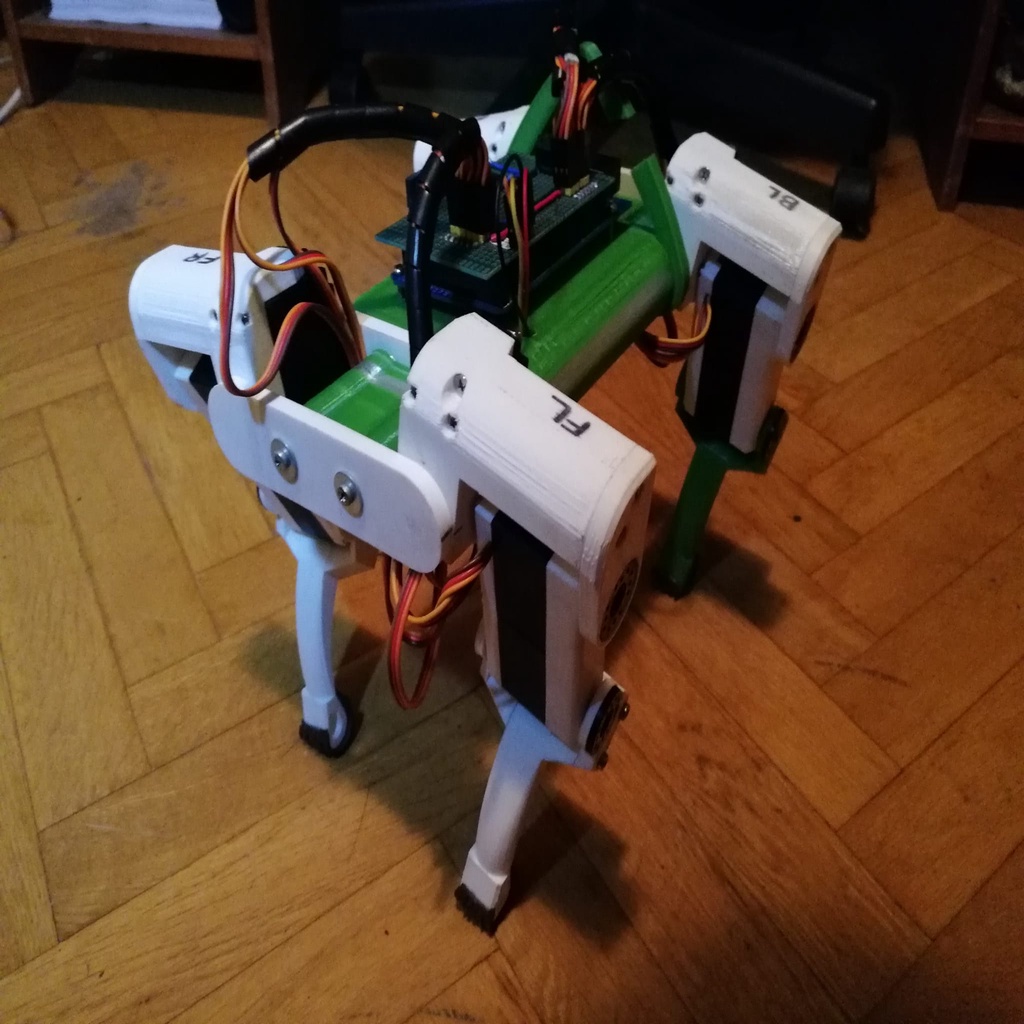
I designed this project to build a robot dog for study and improving my skills in robotics and programming. This robot is specifically designed for MG995/MG996 servos as you can see, new adapted caps will be printed for these servos to save weight and reduce cost. Only the right side parts are included in the files so that they can be mirrored on a 3D printing software. Here are some things to consider when building this robot. Some parts may not have been well-measured so spacers might need to be added, but the leg parts are corrected and fit perfectly with printed caps working for hours without any issues. For the tibia part, two bigger pieces must be glued together as shown in the picture and a thread must be made through the hole for the screw. Be careful not to heat the PLA too much while making the thread. All servo discs also need to be glued. To build this robot, you will need: -24 M3 screws that are at least 25 mm long -16 M3 nuts -2 M8 threaded rods -4 M8 nuts -12 MG995 servos For electronics, an Arduino Mega is currently being used for moving the servos and taking IMU data. A Python sketch on a PC communicates with the Arduino by serial connection where all mathematics for the robot are computed. Work on the code has already begun so it will be shared when it becomes usable. Youtube: https://www.youtube.com/user/TheMiguelasd Github: https://github.com/miguelasd688/Quadruped-dog-like-robot
With this file you will be able to print Arduino quadruped robot for MG995 (OPEN SOURCE) with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Arduino quadruped robot for MG995 (OPEN SOURCE).