All-3d-Printed Mecanum Wheel Rover using Parametric Wheels
thingiverse
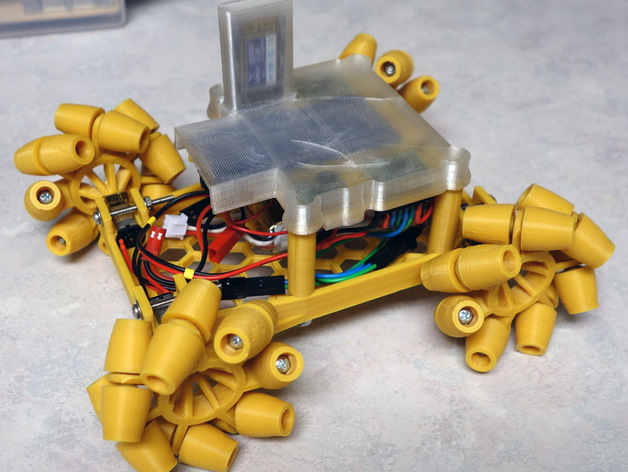
This is a compact sample rover using Mecanum wheels designed by my Parametric Mecanum Wheel generator tool. The goal was to create mechanical components from scratch as a design and learning exercise. For more detailed information about the project, check out this blog post. It performs well on carpet but printed with hard plastic, it lacks enough weight and friction to drive sideways reliably on hard surfaces. Tiny wheel bearings collect hair like crazy. The electronics are held in a "printed protoboard," a frame into which female headers are glued to provide a pluggable holder for each carrier board. The electronics consist of a LPCXpresso board with an LPC1769 (I used this because I wanted to experiment with ARM, though the processing power isn't needed), two Pololu TB6612FNG dual motor drivers, a Pololu D24V10F5 5V regulator, and an Adafruit Bluefruit Bluetooth serial module. All wiring is soldered to female headers. The most recent source code for the SCAD objects, LPC1769 firmware, and PC software to drive it with a game controller are on github. This project was created from scratch but owes much to the incredible Mecanum Wheel Rover 2 by Madox. Specifically inspired by that project are: similar general dimensions, seven rollers per wheel, and use of MR63ZZ bearings. https://youtu.be/EiNMUb7Gtos Print Settings: Printer Brand: SeeMeCNC Printer: Rostock MAX Rafts: No Supports: No Notes: The frame body, spacers, and electronics holder are printed in ABS. The electronics cover was printed with clear PET+, which stuck strongly to the PEI print bed but cracked in several places when removed. This part was put back together with superglue.
With this file you will be able to print All-3d-Printed Mecanum Wheel Rover using Parametric Wheels with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on All-3d-Printed Mecanum Wheel Rover using Parametric Wheels.