Alien Hand
prusaprinters
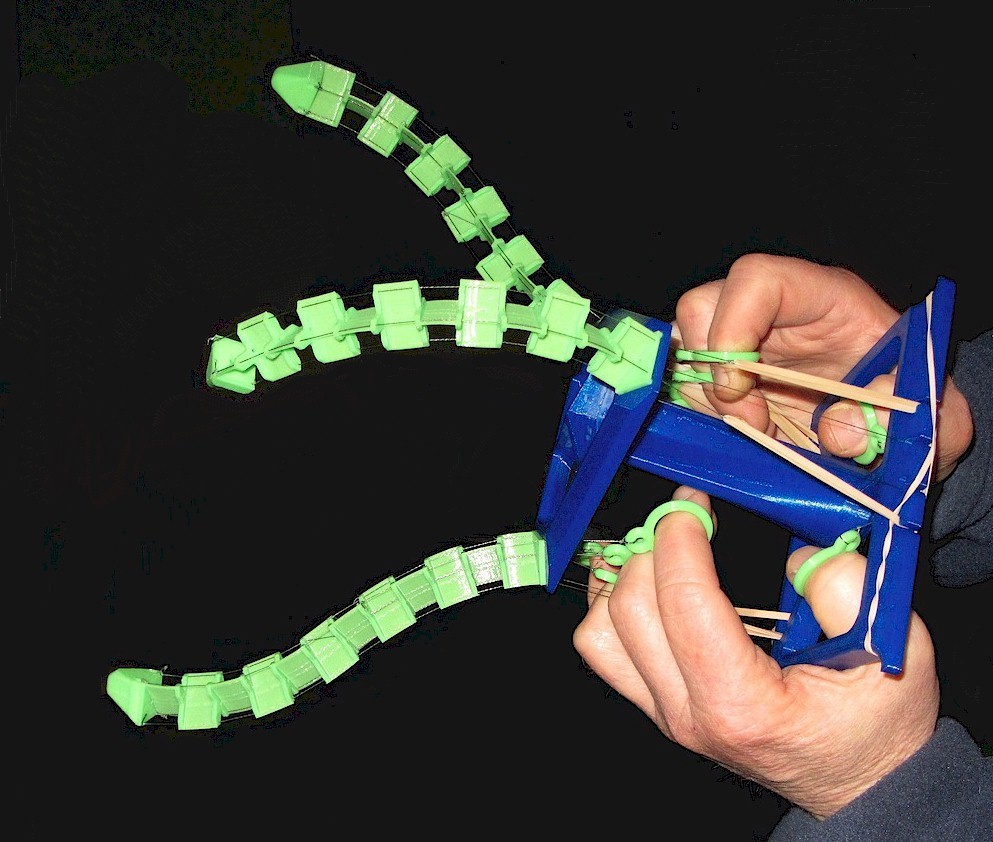
<p>This is what you might call a<em>de</em>-ssistive device - it takes two perfectly good hands to operate one rather feeble (although slightly sinister) one. Inspired by various tentacle designs (<a href="https://www.thingiverse.com/thing:6986">http://www.thingiverse.com/thing:6986</a>, <a href="https://www.thingiverse.com/thing:10337">http://www.thingiverse.com/thing:10337</a>, <a href="https://www.thingiverse.com/thing:206231">http://www.thingiverse.com/thing:206231</a>), each finger prints as a single piece with 12 flexible sections and can be configured in 8,388,608 (give or take) different ways.</p> <p>I've got this version configured as two 4-DOF (degree of freedom) fingers and one 2-DOF thumb. You can actuate particular flexures in a finger by running the tendons through holes in the outside corners, and not activate other flexures by running the tendons through holes in the center. I've biased all three fingers backwards with tendons running along the back side, and that are then attached to rubber bands.</p> <p>And finally, I've mounted the fingers on a palm-gripped platform that lets you use all 10 of your fingers to operate all 10 degrees of freedoms. As you can see from the video (<a href="https://youtu.be/ws8d-CH5kBk">https://youtu.be/ws8d-CH5kBk</a>), though, moving the fingers gracefully will take a bit of practice! I'm hoping some clever soul will print their own and hook it up to rack of RC servos.</p> <h3>Print Settings</h3> <p><strong>Printer Brand:</strong></p> <p>MakerGear</p> <p><strong>Printer:</strong></p> <p>M2</p> <p><strong>Rafts:</strong></p> <p>Doesn't Matter</p> <p><strong>Supports:</strong></p> <p>No</p> <p><strong>Resolution:</strong></p> <p>.2mm</p> <p><strong>Infill:</strong></p> <p>20%</p> <p><strong>Notes:</strong></p> <p>The flexy fingers are printed in PLA, although ABS or PETG might work as well. (Nylon or any of the more flexible filaments would probably be too flexible.)</p> <p>Print with a 0.4mm line width to make the flexures come out right.</p> <p>Print 3 fingers, 1 finger base, 1 hand base, 6 rings, 2 pinkie rings and 2 thumb rings.</p> <h3>Post-Printing</h3> <p><strong>Assembly</strong></p> <p>First insert the finger base into the slots in the hand base and glue the two together with a few drops of superglue. Place each finger into the slots in the finger base (with the flat side of each finger pointing inward) and then superglue into place. Take care not to get any glue into the small holes for routing the tendons.</p> <p>Stringing up the hand take a little patience. It also may take a little playing around to get the tendon lengths right. I used 30# test Spectra fishing line, but you may also be able to use heavy duty button thread.</p> <p>I first ran lines down the back side of each finger, one each through the outside holes in the back corners. Tie them off at the top, and then tie the other end to a rubber band.</p> <p>For the "thumb", I ran two more lines down the two sets of outside front corners holes and then tied each one to the slightly wider thumb rings.</p> <p>For the "fingers", I started only half-way up the finger and then threaded lines through the front outside holes. Tie them off at the mid-point sections and, and then tie one to a regular ring (for your index finger) and the other one to a pinkie ring (for your pinkie).</p> <p>Next, start at the top of the finger and tread two more lines through the outside front sets of holes but stop when you get to the other set of lines. At this point, rout the lines through the central holes in the lower part of the finger. Tie each of these lines to 2 more regular rings (for your middle and ring fingers.)</p> <p>Stretch each rubber band a little to that the fingers are biased backwards a little bit, and slip each rubber band into one of the notches and then loop over a corner. You don't want too much tension one each rubber band. I'm still playing with the best way to rout each rubber band, you you may want to see what works best for you.</p> <p>At this point, you should be able to pull on the rings and have the different finger sections flex.</p> <h3>Custom Section</h3> <p><strong>Operation</strong></p> <p>The hand base still needs a little work to make it more comfortable, but here's how I've ended up holding the thing:</p> <p>Hold the hand so the fingers are pointing away from you and the "thumb" is towards your face. With one hand, slip your index finger into the ring that operates the lower set of flexures closest to you, and slip your middle finger into the ring that operates the upper set of flexures on the same side. Next, slip your ring finger into the ring operating the other upper set of flexures and your pinkie into the ring operating the other lower set of flexures. You may want to have the biasing lines with the rubber bands running between your middle and ring fingers.</p> <p>Repeat with your other hand. Now slip each thumb onto one of the thumb rings for operating the alien "thumb". You may want to get someone to help you get all of the rings slipped onto each finger.</p> <p>Grasp the hand base between your palms. You'll want to play with different positions and orientations to discover what is most comfortable for operation. Now just pull on all 10 rings to move the fingers around. At this point, you are very much like a baby trying to move its hands around without punching itself in the face.</p> Category: Mechanical Toys
With this file you will be able to print Alien Hand with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on Alien Hand.