5 to 1 Gearbox for 2216 motor
prusaprinters
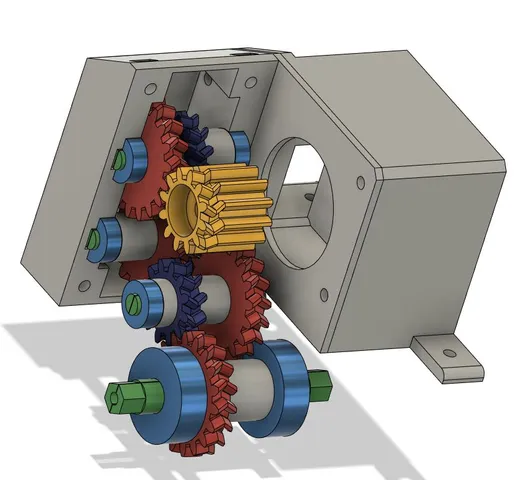
I've since released the car ! You can get it at:https://www.printables.com/model/281110-4wd-rc-car-185-parts-----------------------------------------------------This is a subset of a bigger project that should allow to build a fully functional RC 4-wheel drive car. For the time being, I just started designing the 2 differential boxes. So, while I still have a lot to do on this project, I'm publishing the first piece (the gearbox) that can be used for other designs or as is. It uses 4 steps of a fairly modest reduction at each step. My intent was to provide a lot of torque while still using one of my small 2216 motors.In my previous design (the tugboat) I used the motor as is and the stator was the front part (where the shaft is) whereas the rotor was in the rear, and I was using the motors’ shaft. In this design I'm using the airplane propeller mode with the 2 aluminum parts that are provided with the motor. So, the stator is now at the back (and I do not use the motor’s shaft) and the rotor in the front. The motor is mounted in its housing using the cross shaped aluminum part. This design uses a set of M3 hex screws of different lengths and corresponding nuts. The pinion mounts on the 2216 motor using the provided screw mount intended for a propeller that attaches to the rotor’s casing. You will need a M5 nylon insert nut and an 8 mm wrench to secure the pinion onto the motor shaft.All the gears are Herringbone gears because these gears are the best at transmitting torque.The pinion has 12 teeth, and each shaft assembly features a set of 2 gears, one 18 teeth gear and one 12 teeth gear. Reduction is 0.67 per shaft assembly. The last shaft is the output shaft, and it can be used on both sides (front and rear). The 3 inner shafts use two 11x5 ball bearings each. 11 is the external diameter and 5 is the inner diameter. The output shaft uses two 22x8 bigger bearings. The reason behind that is that the output shaft has a M3 nut insert on both sides so that you can secure the couplers onto the output shaft. Well as these are Herringbone gears, you must assemble the gearbox one stage after the other and put each gear into the right angle on the shaft. The spacers will position the gears in the right position on the shaft. If the gears do not connect well that means that the one on the shaft you are mounting has to be turned over. Assembly goes from left to right when looking at the pinion.I’m including the screenshots for each shaft assembly as mounting aids.Printing tips:I used PLA for the housings and shafts. However, I felt it would be safer to print the gears in PETG (better resistance to heat).Enjoy!
With this file you will be able to print 5 to 1 Gearbox for 2216 motor with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on 5 to 1 Gearbox for 2216 motor.