3 wheel Omni
thingiverse
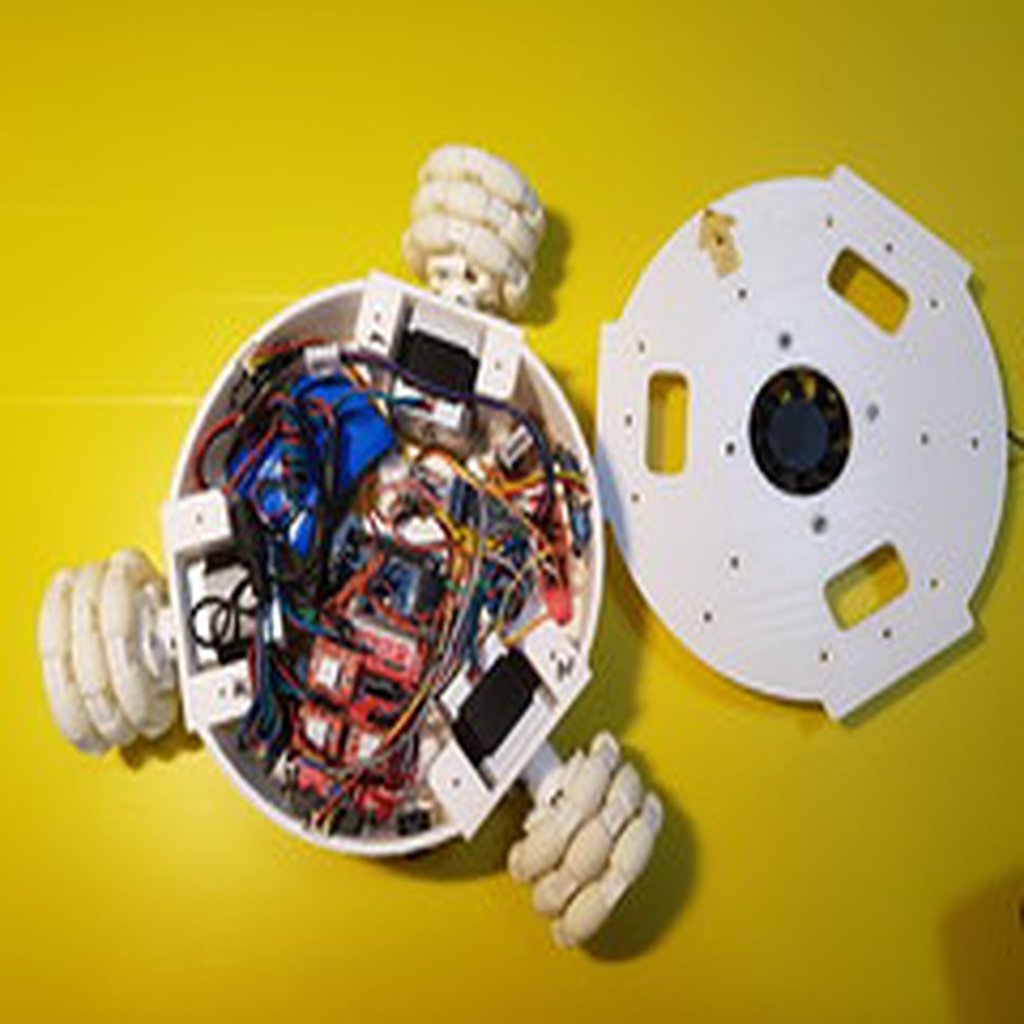
Here are the details for the 3 Wheel Omni robot base, all printed on a CR10-S. All bolts used are M3. Omni wheels can be found here: https://www.thingiverse.com/thing:3723077. The Sketchup file was added on August 21st, 2019. Parts that were 3D printed include: 1) Baseplate (x1) 2) Topplate (x1) 3) Sidewall1 (x1) 4) Sidewall2 (x2) 5) Hub1 (x3) - See omni wheel fabrication 6) Hub2 (x6) - Use 2 per wheel 7) Roller (x54) - Each wheel consists of three sets of six rollers 8) Steppercoupling2 (x3) 9) Stepperhousing (x3) 10) Rollercast1 (x2) - For casting one roller at a time 11) Rollercast2 (x2) - For casting two rollers at a time Electronics: 1) Arduino Mega 2560 (x1) 2) CNC Shield (x1) 3) Nema17 Stepper motor (x3) 4) Bluetooth module HC-06 (x1) 5) 7805 5V regulator (for the Arduino mega current is too low) 6) Sharp IR Sensor GP2Y0A21YK0F (x3) 7) Battery +12V 3000mAh (x1) 8) Box Fan 60x60x15 12V (x1) 9) LED lights (x1) 10) Buzzer 5v (x1) Three wheels provide stability, but lack efficiency and pose a challenge to program. Updates will be available soon for the Arduino code and MIT apps. For rollers: The original design file for 3D printing is used - the silicone rubber roller mold is 1.05 times bigger. Silicone rubber roller casting method: Print the roller cast mold and spray clear acrylic paint on the inside. Mix 50% corn starch and 50% of clear Silicone rubber RTV. Apply the mixture to both sides of the mold (fill in extra). Place a 2mm brass rod in the middle. Press two pieces together and fasten with M3 screws. The roller should set in 2-3 hours.
With this file you will be able to print 3 wheel Omni with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on 3 wheel Omni .