2-DOF 3-link robot wrist study model
prusaprinters
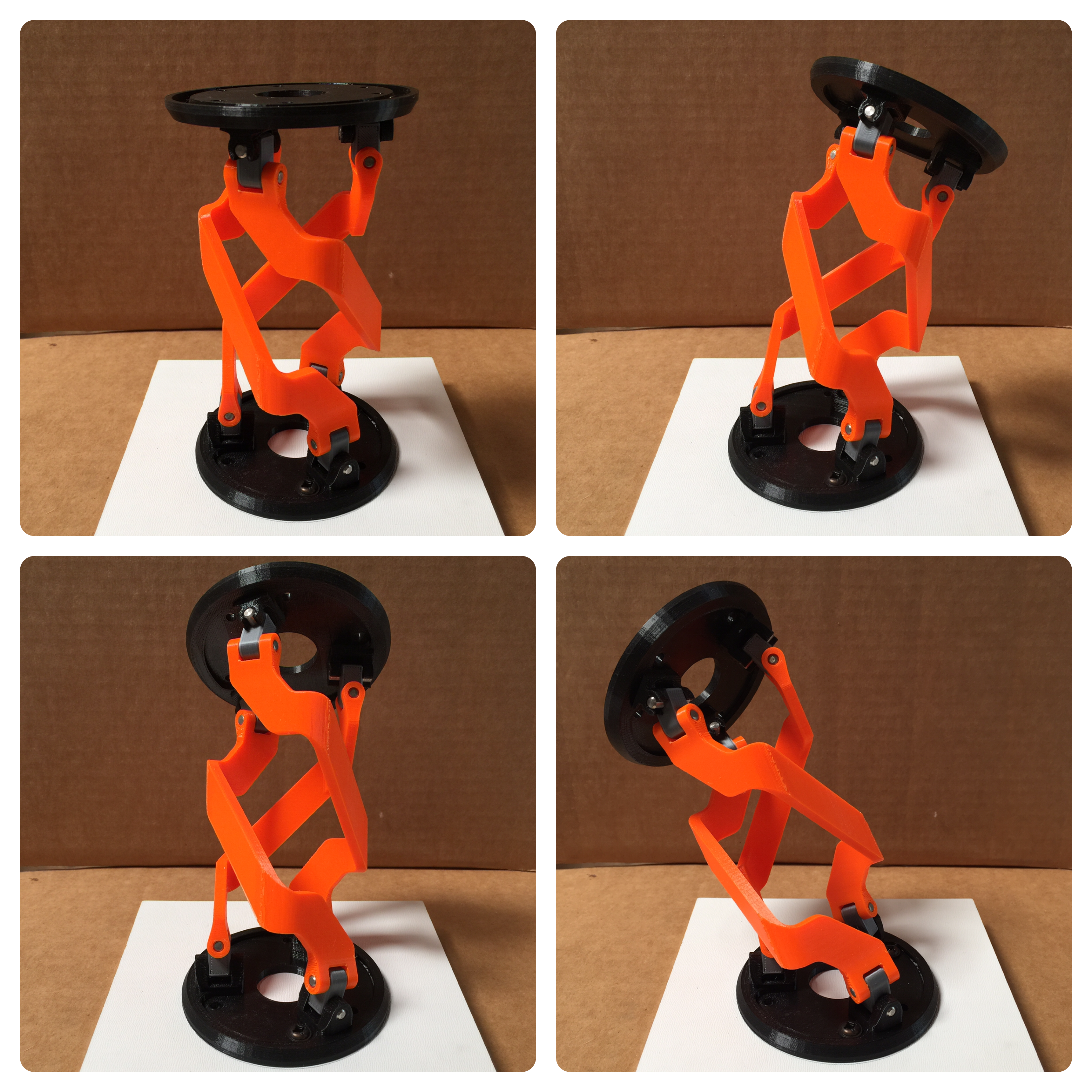
<p>A functional study model of an intriguing wrist joint as seen in a brief Hackaday article about a dextrous robotic arm from Korea.</p> <p><a href="https://hackaday.com/2019/10/20/humanoid-robot-has-joints-that-inspire/">https://hackaday.com/2019/10/20/humanoid-robot-has-joints-that-inspire/</a></p> <p>I printed it in three colors for visual contrast;<br/> Black, Orange, & Silver</p> <p>The mechanism has 2 degrees of freedom: pitch & roll.</p> <p>It stands 6" tall. The end plates are 3.5" in diameter. It uses inexpensive stainless steel dowel pins at all joints. The pins are a light interference fit and are not otherwise retained with clip-rings, etc. It is screwed on onto a 6" x 6" wooden base from an office supply store. Mounting holes are provided for in the model :)</p> <p>Files include: STL, 3mf, & g-code<br/> Materials are PETG & PLA</p> <h3>Print instructions</h3><p>Pretty straight forward. Sharp-eyed viewers will note that in this model the clevises are closed. This is more robust. The open clevis parts broke too easily.</p> <p>This also means that you can chase the holes with a drill or reamer to fit the pins to your liking. I myself built two models--one loose and one stiff to hold poses.</p> <p>Best Wishes for successful printing!</p>
With this file you will be able to print 2-DOF 3-link robot wrist study model with your 3D printer. Click on the button and save the file on your computer to work, edit or customize your design. You can also find more 3D designs for printers on 2-DOF 3-link robot wrist study model.